IMU magnetic field data
The orientation of tags in 3D space is a non-trivial problem that cannot usually be resolved via acceleration sensors alone. Tags by e-obs and other manufacturers therefore integrate data gyroscope and compass data for state-of-the-art estimates of tag orientation termed IMU (intertial measuement unit).
This type of data can be imported into Firetail via File > Open Local Tag Data and CSVs or via the Movebank Data interface.
When working with IMU data it is important to
- calibrate the gyroscope data in the context of compass measurements
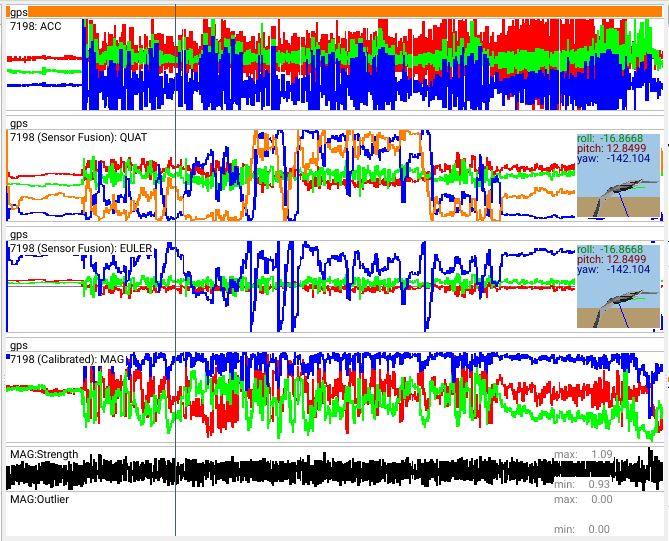
- understand and interpret the outcome (quaternion data)
Note that the outcome of e-obs tags is quaternion data that allows for a direct and unique computation of rotations in 3D space. As their visual interpretation is difficult, Firetail offers an Euler angle visualisation and a “Quat-Preview”, i.e., a 3D model of a tag or a bird (adjustable in the settings dialog) following the measured orientation.
The preview uses common terms from flight cockpits namely
- roll: rotation along the “head-tail” axis
- pitch: rotation along the “wings” axis (upwards vs. downwards)
- yaw: rotation along the “back-chest” axis (view direction)
Calibration
The raw data must be calibrated first to acquire sensible orientation values.
Use Data > Inertial Measurement Unit > e-obs: Calibration and Sensor Fusion to fit an appropriate model [1] and calibrate the data accordingly.
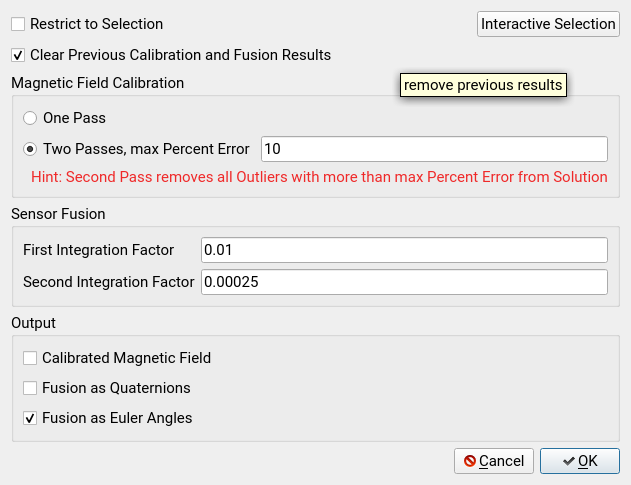
Check Restrict to Selection to calculate the MAG values only for the currently selected sections. By default, the complete time-span is computed.
Check Clear Previous Calibration and Fusion Results to remove previous results.
Choose among one-pass fitting or multi-pass fitting up to a defined error threshold, i.e. an iterative refinement of the initial model. The magnetometer data is fitted to an ellipse in 3D space whereas the number of data with more than k (max percent error parameter) percent deviation is treated as an outlier.
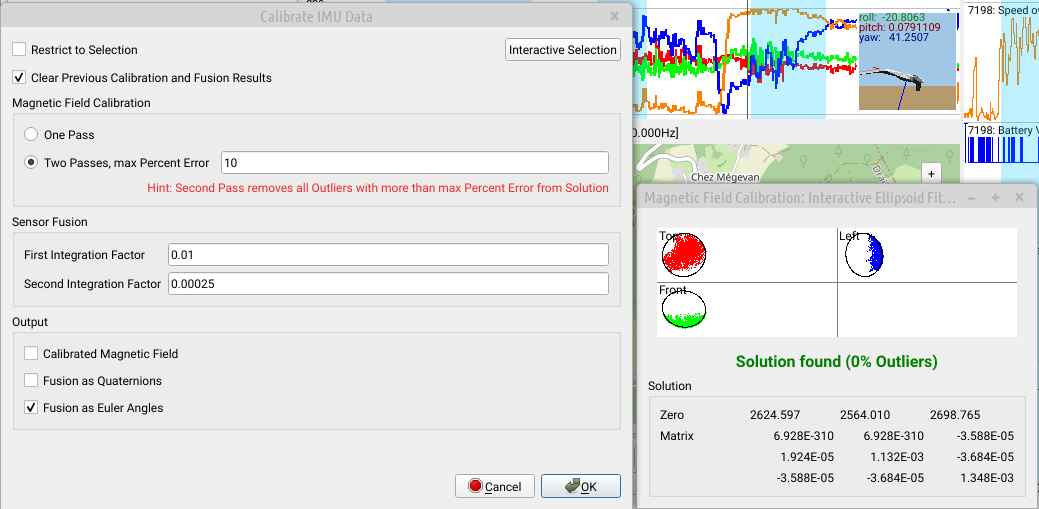
Interactive Calibration
In many cases the goodness of fit for the calibration of the underlying model should be estimated. In the calibration dialog
- click
Interactive Selectionto open the magnetic field calibration window. - use the burst view of the main window to select a time range
- the calibration preview is updated interactively as well as the solution matrix and origin (zero)
- the number of outliers from the ellipsoid fit indicates the goodness of fit and correlates with model quality
To apply the model, press OK. To see the result for the selection range, toggle Restrict to Selection.
Sensor Fusion
Sensor Fusion: multiplicative integration factors for compass fusion. This should usually not be modified. Upcoming versions will include visual error inspection such that the effect of these parameters is more interpretable.
Output
| Checkbox | Description |
|---|---|
| Calibrated Magnetic Field | create a lane for calibrated magnetic field data |
| Fusion as Quaternions | create a lane for quaternion data used for the computation of rotations |
| Fusion as Euler Angles | create a lane for a interpretable Euler angle graph of rotations |
Visualisation
Given data from an IMU (inertial measurement unit) is present, Firetail offers a visualization option to show the spatial orientation of the (e-obs) tracking device.
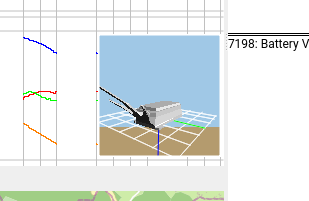
You will now see the device orientation in a 3D viewport:
Note that in the settings you may choose among a bird and e-obs device visuals.
References
- Li, Q., & Griffiths, J. G. (2004, April). Least squares ellipsoid specific fitting. In Geometric modeling and processing, 2004. proceedings (pp. 335-340). IEEE.